試走台の連結に,3Dプリンタで作ったビスケットを
どうも,田部井です
やさロボにご参加,ご観覧の皆様,ありがとうございました.
想定をはるかに超えるレベルのロボットや,皆様の熱い魂に強く揺さぶられ,
ほんと,ボーっと生きてんじゃねーよ俺 って,思いました.
さて,今日ちょこっと紹介したいのが,試走台の板どうしの連結です.
本物の競技台はちゃんと台の上に乗っていますが,本校の試走台は,床置きです.
床さえあれば水平が取れる(かも),のが売りっちゃ売りです.躊躇なく競技台の上に乗っかれるし(土足はダメよ)
15年ほど前に,つくりました.
ローラー刷毛ではなく,こて刷毛で薄めに何度も塗り重ねるのが,本競技台に近づけるコツですね.
しかし,10年以上前から,板が反り始めています.
約90cmの板4枚+スタート台 をつなげて試走台にするのですが,板が反って,板と板の間に段差ができてしまうのです.無視できないレベルで.
薄い冊子や紙をはさんで,段差を解消します.
スタート台部分は冊子だけでもなんとかなるのですが,他の「板と板」の連結部分は,反り方が複雑なので,冊子だけでは対応できません.
どうしよう...ずっと悩んでました
ぴこーん
つ「ジョイントカッター」
マキタ(Makita) 充電式ジョイントカッタ PJ180DZ 18V ●バッテリと充電器は別売ですよ
https://www.amazon.co.jp/dp/B00OZD5GPW
ビスケットは正規の木製のではなく,3.8mm厚のプラスチックビスケットを3Dプリンタで作ります.偽物ビスケット.

データ
https://drive.google.com/file/d/1IuQuf8kgkVDiMxfx1xF7e8AziSl7Ym1a/view?usp=drive_link ●これの,biscuit#20b_1mm.stlですね.
素材はPLAで作りましたが,それが正解かどうかはわからんです
で,もちろん接着剤とかつけずに,ただ板の穴にこの偽物ビスケットを入れて,連結します.
板と板の間に,1辺につき3枚ずつ(4辺合計で12枚).
3枚均等の位置ではなく,ラインの位置には必ずビスケットを入れます.

これなら,後で取り外しもできます.
ビスケットの真ん中に溝があるのは,
片付けのときに万一,ビスケットが入っていることを忘れたまま試走台を持ち上げちゃった場合に,板ではなくビスケットの方が折れるように,
溝を入れてみました.まあ,どれだけ救済されるかは???ですが.
●ビスケットを入れたまま競技台を持ち上げるのは,全力でやめましょう
やってみたら,
...段差がなくなりました(^^)/

予想以上に,けっこういいです.
(注意)
15mm厚や12mm厚の板の厚みの中央に,きちんと水平にビスケット穴をあけるのは,けっこう度胸が要ります.
僕も1か所くらいは失敗しています.
勘に頼らず,床に木の板を置くなどでジョイントカッターが確実に水平になるようにガイドしながら,ビスケット穴をあけるといいと思います
しゃかしゃか走りのこと.
どうも.知能ロボコン1日目終了の時点の,C41田部井です.
部員たちをさしおいて,1次予選突破のラインを超えました.
お前が生き残ってどうするんじゃい?! →ごもっとも.
生徒のC40マシンは,本番では,見たことのない方向に動いていました.試走ではばりばり正確に走っていたのに.
後で調べたら,片輪のマブ○モータ(F○-130)のブラシが半分燃えてなくなってました.そのせいで,正転と逆転で回転速度が変わった(そして最後は回らなくなってしまった)ようです
何百度も試走して本当にがんばった,で,そのせいで,本番では故障が起きてしまう ってのは,実際よくあることだけど,なんか悲しいですよね.
同様な例は過去に,何百度も試走したせいで,7805が劣化した(そのせいで本番は動かなかった)ってのも,あったなあ.
※マブチモータでロボコンに出るのが間違ってる というご意見はまあ
さて,そのマブチの「しゃかしゃか走り」ですが,
まずは,つたないですけど動画を.
https://drive.google.com/file/d/19pACCt1Nh2E0UBVgPH6eYNG-qENMAOEg/view?usp=drive_link
ボールサーチのあたりを見ていただければと.
しゃかしゃか走りとは,単に「25msON,25msブレーキ」をパルス状に繰り返してるだけです.
PSDの値更新間隔が40ms程度なので,ボールサーチのときに,1パルス旋回→PSD読み→1パルス旋回→PSD読み になるように,25+25=50msにしたってことです.それだけです.
で,PSDの最大電圧のところが何パルス目かがわかるので,その位置までパルスでしゃかしゃか逆旋回すれば,ボールの向きを向く.
次に,
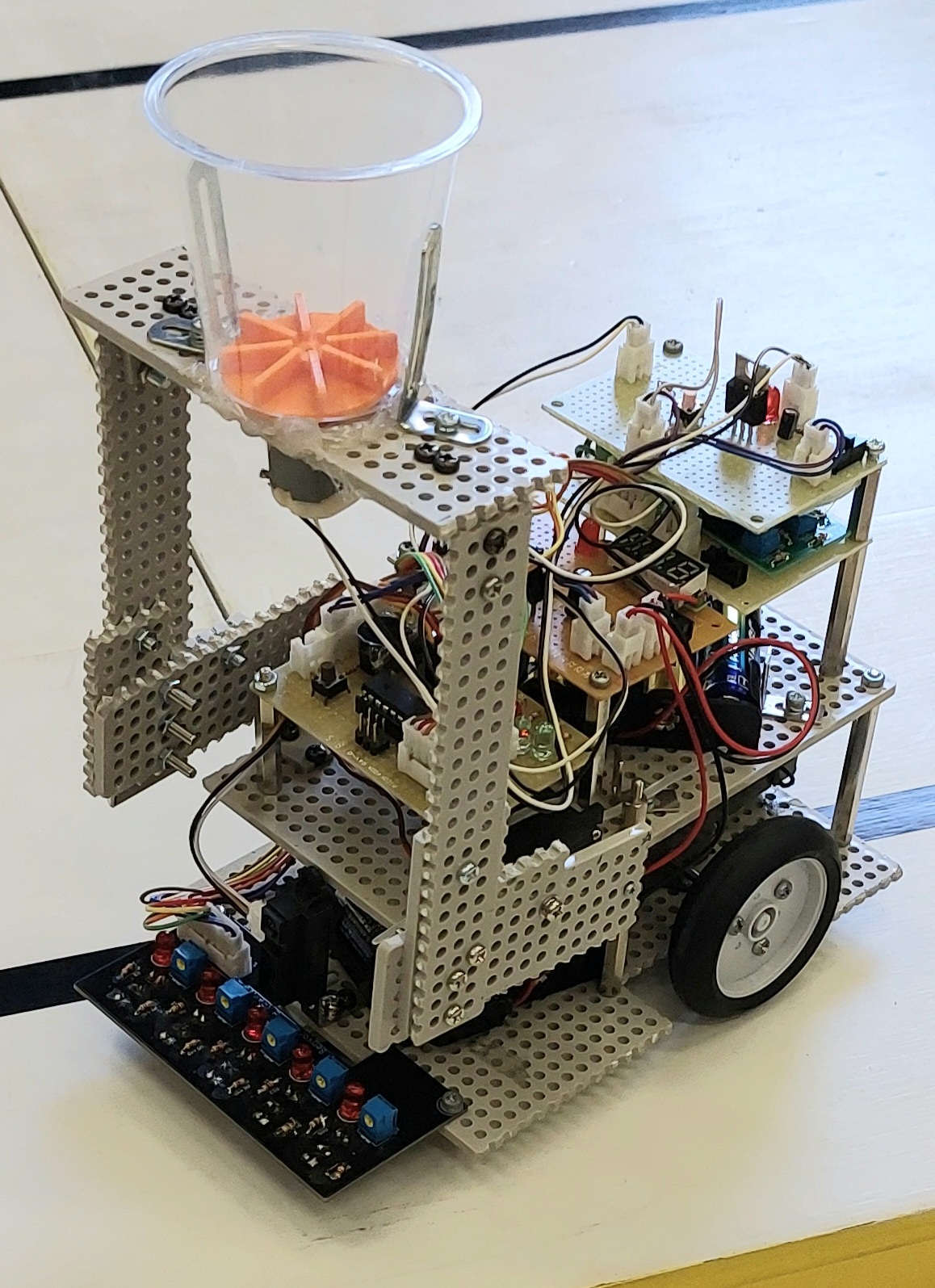
(この動画はワンウェイホイールアームなので違いますが)部活では主にファンでボールを吸引して取るアームを使っており,
(例)http://www.inrof.org/2023/irc/score/rinfo/rimage/robotimg042.jpeg
{kind=link}
ロボット車体をボールから適切な距離(うちらの場合は190mm)に取らないと,ボール取りアームを下ろしたらボールにぶつかっちゃうので,予め測定しておいた「パルス数-走行距離グラフ」をもとに,ボールとの現在距離をPSD電圧から計算し,これが190mmになるようにしゃかしゃかパルス前進(またはパルス後退)します.
要するにしゃかしゃか走りは,なんか,ステッパみたいな使い方ですね.ステッパほどではないですが,まあまあ正確です.ちなみに↑のグラフは比例グラフではなく,y切片ありの一次関数にだいたいなります.
なお,グラフは前進と後退で異なります.しゃかしゃかパルス前進でまっすぐ走るように左右のモータの速度を微調整します.その場合,パルス後退はまっすぐバックしなくなっちゃいますが,まあまあまっすぐバックするので,細かいことはOKかなと.
パルス走行で走ったり止まったりを細かく繰り返すので,しゃかしゃか音がする.
しゃかしゃか走りは,まあまあ確実にまっすぐ前進するので,ボールサーチだけでなく,「必ずまっすぐ走って欲しいとき」「指定距離を走ってほしいとき」に,このしゃかしゃか走り(パルス走行)を行っています.マブチモータは,盲目運転での速さや距離の再現性が弱いのが難点ですが,しゃかしゃか走りは再現性がかなり良く,プログラミングがだいぶ楽になります.遅いけど.
※ただ,ロボットを1日放置すると,しゃかしゃかでもまっすぐ走ってくれなくなります.ブラシの酸化?
そんなときは毎日はじめに左右モータ速度を調整...するのではなく,とりあえず3mほどしゃかしゃか前進させると,酸化膜がとれるせいか,再びちゃんとまっすぐ走ってくれるようになります.再度調整する必要なし.
7291亡き今,マブチのモータドライバは,秋月で売ってるTB6612のキットを使っています(555を別基板で外付けし,PWMをかけて速度調節します).ただこのTB6612は突入電流に弱く,急な逆回転とかするとどんどん劣化破壊していきます.たとえば,前進→右旋回 とかやると徐々にかつ確実に壊れていきます.それも,最初は全く動かなくなるのではなく,「正転はちょっと遅い.逆転は元気」とかのような,なんとも微妙な壊れ方をするのがやっかいです.
前進→0.1sブレーキ→逆回転 をきちんと行えば大丈夫なのです.プログラミングでこれをしっかりやればいいのです.でも,子供にそんなこと言っても,守るわけがありません(ていうか,理解すらしません).
なので,子供にTB6612を渡すときは,
・1Ωのセメント抵抗をモータに直列に入れたり
・PWMが50~80%でしか変化しないようにしたり(要するに最大値を80%に制限する)します.
初めからステッパを使わせちゃう方が楽なのですが,初心者の子供は平気で+-がショートしてる基板とかを作るので,強力な電池は怖くて渡せません.そして何より,「モーターは電池をつなげば回るもの」と思ってる子供たちには,ステッパを回す原理は感覚的に理解できない.発達段階的にムリ.
だから,最初はこんな感じでマブチモータでロボットを作ってもらい,「パルスでコントロールする」ってことに慣れてきたあたりでステッパに切り替える,を,しています.その頃にはショート基板は作らなくなるし.
やさしいロボコン(やさロボ) 12/3(日)当日の時程です
こんにちは.ブログはお久しぶりです.
12/3(日) やさしいロボコン(やさロボ)を実施いたします.
https://yasarobo.sclub.dev/
やさしいロボコン(やさロボ)12/3当日の時程です.
8:00開場 準備はここから可能です
9:00渋渋関係者集合
10:00迄に 出場者の皆様集合 10時に出走順決めと,ロボット名確認
観覧者の皆様も適宜お越しください.準備風景も観覧できます
10:50頃に開会式 11:00にはキックオフ.走行は各自2回です.
台数次第だけれど,遅くとも15:00には終了予定 その後,片づけ,撤収
という流れです.
場所は,渋谷教育学園渋谷中学高等学校 6Fの理科室です
この日は,中学受験の模試も同時開催しています.子供たちの流れとは別で,エレベータへ6Fへ上がってください.
近況報告 -ロボコン班-
お久しぶりです。最後の更新から1年以上が過ぎてしまいました。この1年でいろいろあったので、ロボコン班の今日までの活動をこの記事でご報告します!
工作教室(2018年12月@AssemblagePCN秋葉原)
最後の更新から約3ヶ月後、秋葉原の高架下の電子工作スペース、Assemblageさんにて工作教室を行いました。体を3Dスキャンして3Dプリンタで印刷したり、部員と顧問が設計したオリジナルのリフティングゲームを製作してもらいました。
この数年間工作教室は実施していなかったので、部員一同緊張していましたが、無事催行出来ました。来て頂いた皆さんに工作の楽しさを伝えられていたら幸いです。
知能ロボコン2019
渋渋理科部ロボコン班からはOB、顧問を含めてチャレンジャーズコースに4台が出場しました。そして部員が決勝4位を、そして、OBが栄えある決勝1位を獲得しました。
工作教室(2019年8月@渋谷区文化総合センター大和田)
8月には学校近くの渋谷区文化総合センター大和田で工作教室を行いました。
Open School Day(2019年8月@渋渋)
渋渋としても創立以来初の試みとして行われた、学校主催のOpen School Dayに理科部も参加しました。沢山の方にご来場いただき、電子工作や、3Dモデリング、プログラミングなどを体験していただきました。
読売新聞オンラインにて、当日の様子や、インタビューを載せて頂きました。ぜひご覧ください。
https://www.yomiuri.co.jp/kyoiku/support/information/CO036569/20191107-OYT8T50019/amp/
工作教室(2019年12月@友安製作所)
そして本日12月27日、友安製作所にて2019年最後の活動を行いました。
電子工作・プログラミング体験企画を実施しました。また部員もロボットの制作などの活動を行いました。

駆け足となってしまいましたが、以上になります。
工作教室はこれからも開催していく予定です。最新情報はTwitterまたは公式HPで更新していきます。ぜひ、奮ってご参加ください。お待ちしてます!
来年も理科部をよろしくお願いします。皆さん良いお年を!
ロボコンだって、合宿がやりたい。
部活でやることって、どうしても場所によって制約を受けがちですよね。しかしロボコン班は、基本的にコンセントがあれば(半田付けするなら換気しやすいことも大事)どこでも作業ができます。わざわざ「環境を用意する」までもなく、自分が寝起きしている部屋だって部室に変えられます。
でも、ロボコンだって合宿やりたいんです!今年も例年通り都内某所セミナーハウスにて2日間(8/23,24)の合宿を行ってきました。
例年は2~3つのセミナー室を借りてハード作業部屋とソフト作業部屋に分けているのですが、今年は先輩と顧問の先生による「講座メニュー」を多めに設けたため、作業部屋と講座部屋という分け方になりました。講座内容はこんな感じ↓
- 中1向けCプログラミング基本講座by高1
- 中1向けC-styleとE-gadgetを使用したロボット制御講座by中3
- 中1向け電圧系を使ったハードの欠陥探し講座by顧問
- 中2以上向けステッピングモータ解剖深夜講座by高2
たくさん講座をこなした中1も、講座の準備と後輩の指導をしながら自分の作業にも取り組んだ中2以上も忙しかったですね(汗)。まとまった時間をとれるからこそできる講座も多いので、そういう場で普段とはちょっと違う発見をしてもらえたらいいなぁと思っています。

さて、この記事の投稿は夜更かし部員のせいで9月1日の午前1時ごろになっているはずです。ということは、数時間後には休み明けの学校が始まっています。ということは…??
飛龍祭です!!
9月7日(金)、8日(土)に開催される渋渋の文化祭が目前です!直前にまたお知らせをするかもしれませんが、理科部は6階理科室Ⅱで今年も実験やロボットの実演を行います。お待ちしております!!
仙台2018まとめ
今年はもっとこまめに更新しようと思ってたんですが、忙しさにかまけてこんな季節になっちゃいました(汗)。今更ですが6月16,17日に仙台市科学館で開かれた「知能ロボットコンテスト」の報告をさせていただこうと思います。
私たちにとっては1年に1度の大きな大会である仙台知能ロボコン。今年は30回目の節目の年で、大会のこれまでを振り返るビデオが放映されるなどアニバーサリーな雰囲気が漂う2日間でした。
渋渋理科部ロボコン班からはチャレンジャーズコースに6台が出場し、C02(筆者製作)がこの部門での準優勝をいただきました。
準優勝という看板もいいモノですが、試行錯誤してマイナーチェンジを繰り返し、約1年半じっくり向き合ってきた成果を余すことなく競技台で示せたことが何よりの喜びです。技術的な下地を調えて指導してくださった先輩方、マシンの不調の理由を一緒に考えてくれたロボコン班や化学班のみなさん、本当にありがとうございました。なおオーム社さんの「ロボコンマガジン9月号」にてこのロボコンの記事が組まれており、ほかの名だたる出場ロボットに加えてC02もちょっぴり紹介されていました。ご興味のある方は是非ご一読いただければと思います。
顧問の先生のロボは今年も不思議な挙動で会場を沸かせていたり、今回が初参加だった出場者はロボットを動かす力を大いに上げられたのではないかと思います。また中1の新入部員は同時開催のロボコンジュニアでロボット操作を学んだり、高1の先輩主催のプログラミング講座を受けたりとこちらも充実していたようです。
一方、今回の仙台は私たちに重大な記憶と教訓を遺していきました。
帰りの東北新幹線が事故で止まったんです。
科学館を出て帰路につこうとしたそのころ、運転見合わせの第一報が入りました。数十分待てば動き出すのかなと思って仙台駅に行ったらごった返す駅。動きません。サバイバル開始です。仙台駅構内にブルーシートを敷かせていただき、20名弱で夕飯を食べてあの手この手でスマホの充電をしながら4時間以上耐久しました。その後ようやく動き出した新幹線に飛び乗り、ほとんどの参加者は帰宅が0時を回っていました。自宅に間に合わず、先輩宅に泊めてもらったというケースも…。同じく帰宅に困った姉妹校、渋幕の一団は仙台にもう一泊したのだとか。私たちきっと、史上最もへこたれない理科部に進化してると思います(笑)。みなさん本当にお疲れさまでした…。
次回は8月の合宿の様子を早めに更新しようと思います。

↑ チャレンジャーズコース決勝で競技直前に撮ったもの。自分のロボに、奥では優勝したC10「高橋とうふ店」さんと、話題をかっさらったC35「タイヤ絶対撲滅太郎先輩」が稼働(走行じゃないんですよ)しているお気に入りの1枚です。
新年度がやってきた!
さて、新年度です!!
他校の理科系部活の皆さんのツイートを拝見していると「新入生が○○人~~」なんて話題も盛んになってきました。うちの学校では一応、新入生の部活開始は秩父での移動教室が終わって学年の親交が深まってから、ということになっているので部活体験日は5/10(木)になっています。
4/21(土)の新入生歓迎会では中学の部員が信号機反応の実験パフォーマンスを披露し、新入生をはじめとする観客からは「おお~~!」という歓声が上がっていました!!あと、おなじく中学の部員が作成した部活紹介スライドのクオリティが超高かったのが僕の推しポイントです(笑)。(ちなみに高校生は新歓に出られないので、動画で確認しただけです…)理科好き、理科に興味のある新しい仲間をたくさん迎えられたらいいですね。
